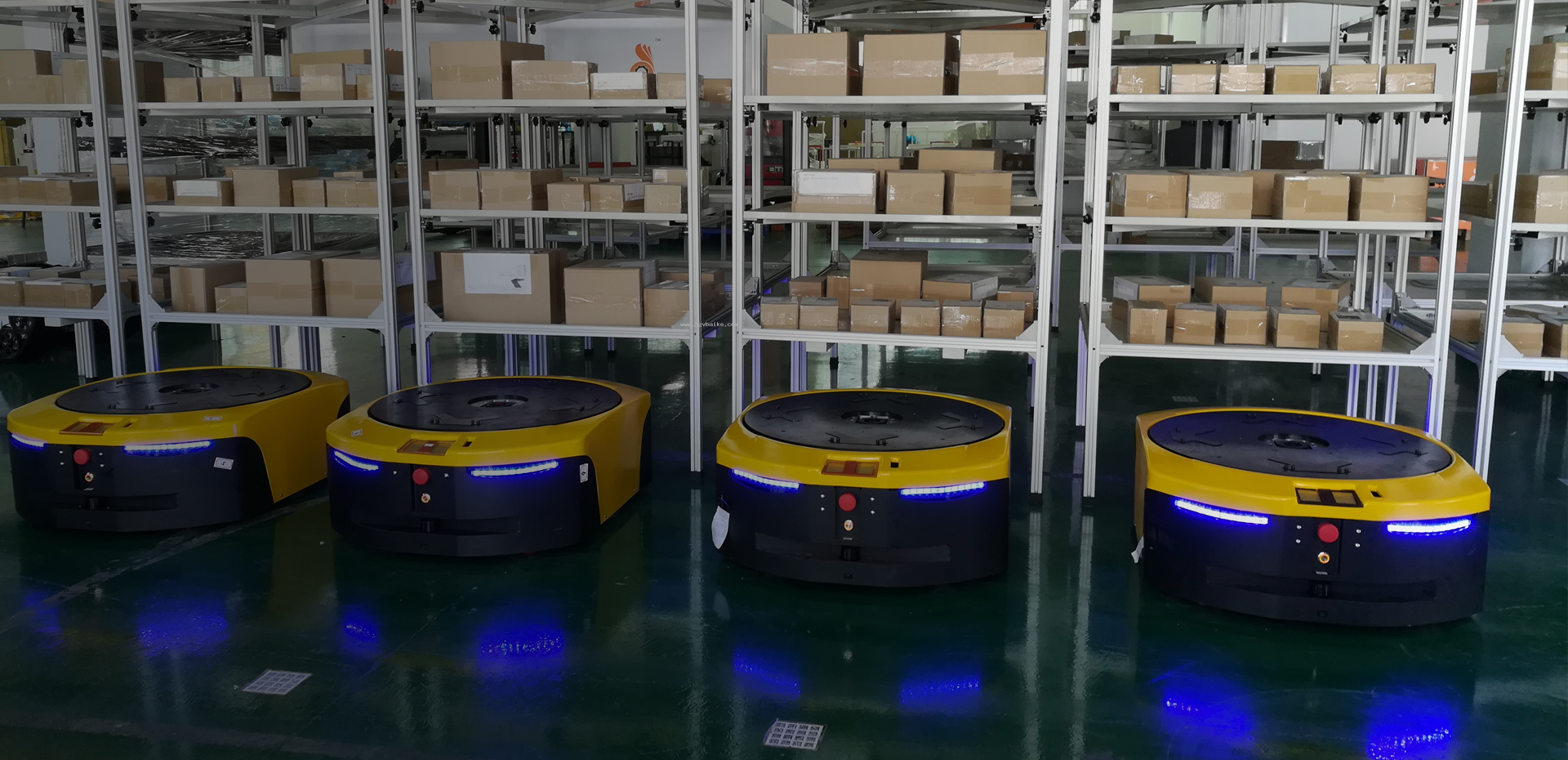
搬運(yùn)機(jī)器人AGV小車的主要功能:
主要是集中在主動(dòng)物流搬運(yùn)上,AGV小車搬運(yùn)機(jī)器人主動(dòng)通過特殊地標(biāo)導(dǎo)航將貨物運(yùn)輸?shù)街付ǖ攸c(diǎn),最常見的指導(dǎo)方法為磁條引導(dǎo)、激光引導(dǎo)。如今,東莞途靈AGV設(shè)備廠家開發(fā)的超高頻擴(kuò)展性領(lǐng)先眾多同行。RFID引導(dǎo),磁條引導(dǎo)的方法是引導(dǎo)磁條最常用、最經(jīng)濟(jì)的方法,但設(shè)置有不可避免的局限性,對場地裝修風(fēng)格有一定的影響;激光引導(dǎo)成本相對較高,對場地的要求也比較高,所以一般不采用;RFID引導(dǎo)成本適中,優(yōu)點(diǎn)是引導(dǎo)精度高,站點(diǎn)設(shè)置更方便,可以滿足最復(fù)雜性雜項(xiàng)規(guī)劃,對場所整體裝修環(huán)境無影響,其次,RFID磁條導(dǎo)航和激光導(dǎo)航方法有著高安全性和穩(wěn)定性。

搬運(yùn)機(jī)器人指導(dǎo)方法:
一、電磁感應(yīng)式:即我們最常見的磁條導(dǎo)航,在空中粘貼磁帶后,AGV主動(dòng)搬運(yùn)車經(jīng)過時(shí),車底裝有電磁傳感器會感應(yīng)到空中磁條的地標(biāo),然后結(jié)束主動(dòng)運(yùn)輸貨物,邊界依賴于磁條極性的不同排列組合。
二、激光感應(yīng)式:通過激光掃描儀識別設(shè)置在其活動(dòng)范圍內(nèi)的幾個(gè)定位標(biāo)志,確定其坐標(biāo)方向,然后引導(dǎo)AGV小車運(yùn)轉(zhuǎn)。
總結(jié)、感應(yīng)原理,通過感應(yīng)原理,RFID標(biāo)簽和讀取裝備主動(dòng)檢測坐標(biāo)位置,結(jié)束AGV小車主動(dòng)運(yùn)行,設(shè)備定義通過芯片標(biāo)記隨意定義簽名,即使是最復(fù)雜的設(shè)備設(shè)置也能輕松完成。
總部
王先生 166 2067 5888(微信同號)
盧 工 130 6618 0620(微信同號)
葉 工 180 3303 1613(微信同號)
地 址:廣東省東莞市寮步鎮(zhèn)寮步香園東路60號5棟901室
東南亞越南分公司
電話:0084-9188 90910(文先生)
電話:0084-0335 355585(杜小姐)
電話:189 2527 1259(微信同號)文先生
地址:北寧省桂武縣鳳毛社毛豎村18號路